BioBot
Autonome Robotik zur Förderung der Biodiversität im Straßenbegleitgrün
Entwicklung eines autonomen Robotersystems zur ökologischen Aufwertung und effizienten Pflege von Straßenbegleitflächen.
Unterstützt durch




Förderhinweis
Gefördert im Rahmen der Maßnahme Digital GreenTech – Umwelttechnik trifft Robotik durch das Bundesministerium für Forschung, Technologie und Raumfahrt (BMFTR).
01
Projektziel
Straßenbegleitflächen bieten ein großes, bislang kaum genutztes Potenzial für Natur- und Klimaschutz. Ziel des Projekts ist die Entwicklung eines autonomen Robotersystems, das diese Flächen ökologisch aufwertet und gleichzeitig effizient pflegt.
Der Roboter soll:
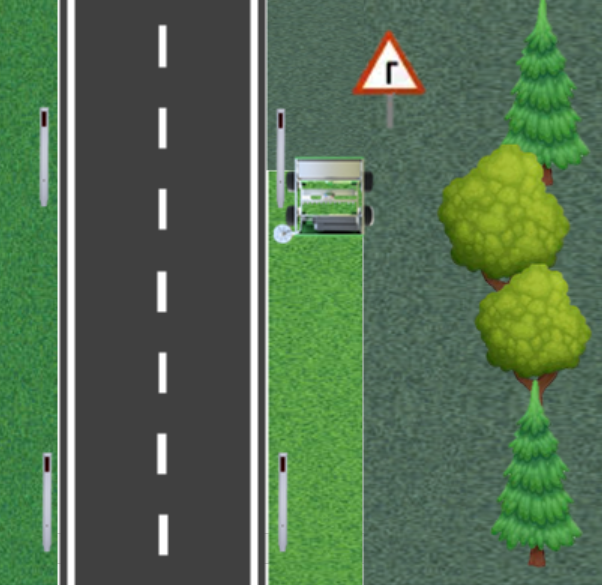
Straßenränder selbstständig befahren
Selektiv und insektenschonend mähen
Invasive Pflanzen gezielt zurückdrängen
Gezielt heimische Arten ausbringen
Damit werden Straßenränder aktiv zu Biotopverbundachsen entwickelt.
02
Ausgangssituation
Straßenbegleitflächen werden heute meist konventionell gepflegt – oft durch Mulchen oder einfache Mahd. Das führt zu mehreren Problemen:
Förderung konkurrenzstarker Pflanzen durch Nährstoffanreicherung
Verdrängung heimischer Arten
Starke Ausbreitung invasiver Pflanzen (z. B. Goldrute, Staudenknöterich)
Hohe Schädigung von Insekten durch ungeeignete Mähtechnik
Gleichzeitig bleiben große Flächen ökologisch ungenutzt, obwohl sie als Vernetzungskorridore eine wichtige Rolle für die Biodiversität spielen könnten.
03
Lösungsansatz
Das Projekt verfolgt einen integrierten, technologiebasierten Ansatz:
Autonome Navigation entlang von Straßenrändern
KI-basierte Pflanzen- und Umfelderkennung
Selektive, abschnittsweise Mahd statt flächiger Bearbeitung
Gezielte Bekämpfung invasiver Arten
Aktive Nachsaat heimischer Pflanzenarten
Der Roboter kombiniert Pflege, Monitoring und ökologische Aufwertung in einem System.