BioBot
Autonomous robotics to promote biodiversity in roadside green areas
Development of an autonomous robotic system for the ecological enhancement and efficient maintenance of roadside areas.
Supported by




Funding Notice
Funded under the Digital GreenTech initiative – environmental technology meets robotics – by the Federal Ministry for Research, Technology and Space (BMFTR).
01
Project Goal
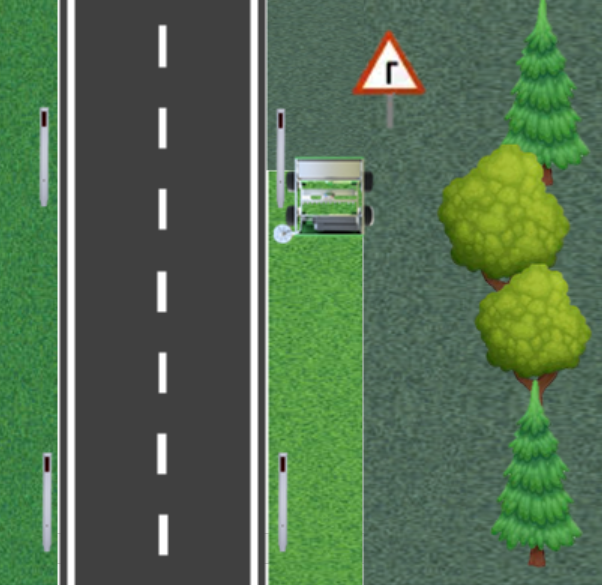
Roadside areas offer great, yet largely untapped potential for nature conservation and climate protection. The goal of the project is to develop an autonomous robotic system that enhances these areas ecologically while maintaining them efficiently.
The robot is intended to:
Navigate roadside areas autonomously
Mow selectively and in an insect-friendly manner
Specifically suppress invasive plant species
Actively introduce native plant species
In this way, roadside areas are actively developed into ecological corridors.
02
Initial Situation
Roadside areas are currently maintained mostly using conventional methods – often through mulching or simple mowing. This leads to several problems:
Promotion of competitive plant species due to nutrient accumulation
Displacement of native species
Strong spread of invasive plants (e.g., goldenrod, knotweed)
High damage to insects due to unsuitable mowing techniques
At the same time, large areas remain ecologically underutilized, even though they could play an important role as connectivity corridors for biodiversity.
03
Approach
The project follows an integrated, technology-based approach:
Autonomous navigation along roadside areas
AI-based plant and environment detection
Selective, section-based mowing instead of full-area processing
Targeted control of invasive species
Active reseeding of native plant species
The robot combines maintenance, monitoring, and ecological enhancement in a single system.